
목차
Problem definition
기존 Experience replay buffer는 uniform하게 선택하여 우선 순위가 없다. 우선 순위를 매기면 state correlation이 높아질 수 있다는 문제가 있다. 그러므로 우선 순위의 장점과 random sample의 장점을 잘 섞어보는 것이 목적이다.
Priority
Replay buffer가 커질수록 중요한 sample을 뽑을 확률이 감소한다.
그러므로 TD error를 우선 순위 지표로 사용해서 확률을 높이자.
\[P(i) = \frac{P^a_i}{\sum_k P^a_k}\]a가 0 이면 uniform하게 선택하고 클수록 TD error에 민감하게 반응한다.
\(P_i\)를 선정하는 방식은 두가지로 TD error를 그대로 사용하는 방법과 TD error의 rank를 사용하는 방법이다.
where \(\delta\) is TD error and \(\epsilon\) is small value for preventing \(P_i\) become 0
\[P_i = \frac{1}{\text{rank}(i)}\]example)
TD_error=[12, 2, 0]
rank = [1, 2, 3]
\(P_i = [1, \frac{1}{2}, \frac{1}{3}]\)
Importance Sampling
Importance sampling은 원래 확률이 \(P_i\)지만 우리가 가지고 있는 확률 분포가 \(Q_i\)일 때 \(Q_i\)를 이용하여 \(P_i\)를 추정하는 방법이다.
\[E[X] = \underset{i=1}{\overset{N}{\sum}} x_i p_i = \underset{i=1}{\overset{N}{\sum}} x_i \frac{p_i}{q_i}q_i\]Importance Sampling Weight
논문에서는 원래 확률 분포 \(P_i\)는 uniform distribution이라고 하고 \(Q_i\)는 TD_error로 설정하였다. 이때 Importance Sampling Weight는 아래와 같다.
\[\frac{\frac{1}{N}}{P_i} = \frac{1}{NP_i}\] \[\text{Importance Sampling Weight} = (\frac{1}{NP_i})^{\beta}\]\(\beta\)가 1 일 경우 uniform의 경향을 최대한 고려하는 것이고 0일 경우 완전히 무시하는 것을 의미한다.
Algorithm
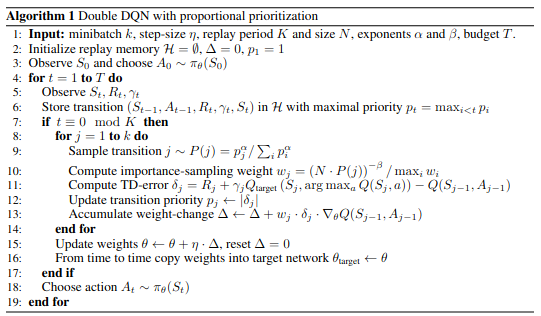 PER algorithm
PER algorithm